In [1]:
# ��Ÿ�� ���� GPU ���� ����
!pip install torch torchvision
!pip install pillow==4.1.1
%reload_ext autoreload
%autoreload
In [2]:
!rm -r images
import os
try:
os.mkdir("images")
os.mkdir("images/dogs")
os.mkdir("images/cats")
except:
pass
!wget https://i.kinja-img.com/gawker-media/image/upload/s--WFkXeene--/c_scale,f_auto,fl_progressive,q_80,w_800/ol9ceoqxidudap8owlwn.jpg -P images/dogs
!wget https://www.rspcansw.org.au/wp-content/uploads/2017/08/50_a-feature_dogs-and-puppies_mobile.jpg -P images/dogs
!wget https://www.catster.com/wp-content/uploads/2018/05/A-gray-cat-crying-looking-upset.jpg -P images/cats
!wget https://www.scarymommy.com/wp-content/uploads/2018/01/c1.jpg?w=700 -P images/cats
In [0]:
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.init as init
import torch.utils.data as data
import torchvision.datasets as dset
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
2) Hyperparameter¶
In [0]:
batch_size= 1
learning_rate = 0.0002
num_epoch = 100
2. Data Loader¶
In [0]:
img_dir = "./images"
img_data = dset.ImageFolder(img_dir, transforms.Compose([
transforms.Resize(256),
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
]))
train_loader = data.DataLoader(img_data, batch_size=batch_size,
shuffle=True, num_workers=2)
In [0]:
def conv_block_1(in_dim,out_dim,act_fn,stride=1):
model = nn.Sequential(
nn.Conv2d(in_dim,out_dim, kernel_size=1, stride=stride),
act_fn,
)
return model
def conv_block_3(in_dim,out_dim,act_fn):
model = nn.Sequential(
nn.Conv2d(in_dim,out_dim, kernel_size=3, stride=1, padding=1),
act_fn,
)
return model
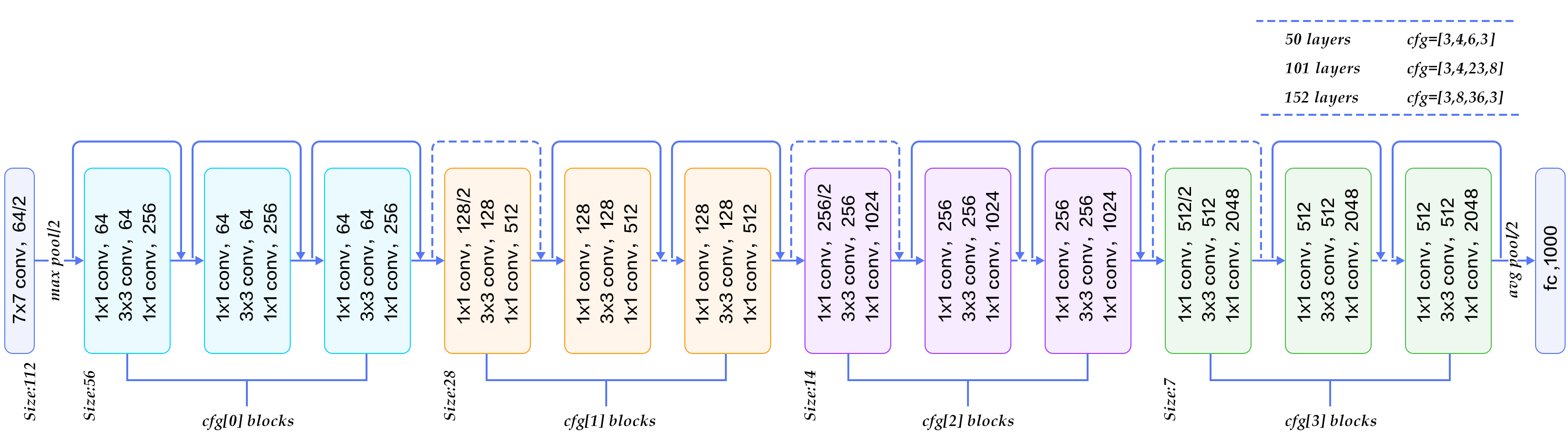
2) Bottle Neck Module¶
- Bottle Neck ����� [1x1 ������� -> 3x3 ������� -> 1x1 �������]���� �̷�����ϴ�.
- �� ���� ��Ʈ��ũ ���������� �� �� �ֵ��� �Ǽ��� ũ�Ⱑ ������ �ʴ� ���, ������ ũ�Ⱑ �پ��� ����Դϴ�.
- �̸� �ѹ��� �����ϱ� ���� down�̶�� ������ ũ�� ���� ���θ� ǥ���ϰ� ���ǹ����� ����� ���� ���� �����߽��ϴ�.
- ���� ResNet�� Skip-connection�� �ܼ� ���ϱ�� ���ǵǾ� �ֱ� ������ Ư�������� ũ�⸦ ��ġ���Ѿ� �մϴ�.
- �̸� ���� ������ �����ִ� ���ҷ� dim_equalizer��� ���� �����߽��ϴ�.
In [0]:
class BottleNeck(nn.Module):
def __init__(self,in_dim,mid_dim,out_dim,act_fn,down=False):
super(BottleNeck,self).__init__()
self.down=down
# Ư�������� ũ�Ⱑ �����ϴ� ���
if self.down:
self.layer = nn.Sequential(
conv_block_1(in_dim,mid_dim,act_fn,2),
conv_block_3(mid_dim,mid_dim,act_fn),
conv_block_1(mid_dim,out_dim,act_fn),
)
self.downsample = nn.Conv2d(in_dim,out_dim,1,2)
# Ư�������� ũ�Ⱑ �״���� ���
else:
self.layer = nn.Sequential(
conv_block_1(in_dim,mid_dim,act_fn),
conv_block_3(mid_dim,mid_dim,act_fn),
conv_block_1(mid_dim,out_dim,act_fn),
)
# ���ϱ⸦ ���� ������ �����ִ� �κ�
self.dim_equalizer = nn.Conv2d(in_dim,out_dim,kernel_size=1)
def forward(self,x):
if self.down:
downsample = self.downsample(x)
out = self.layer(x)
out = out + downsample
else:
out = self.layer(x)
if x.size() is not out.size():
x = self.dim_equalizer(x)
out = out + x
return out
2) ResNet Model¶
In [0]:
class ResNet(nn.Module):
def __init__(self, base_dim, num_classes=2):
super(ResNet, self).__init__()
self.act_fn = nn.ReLU()
self.layer_1 = nn.Sequential(
nn.Conv2d(3,base_dim,7,2,3),
nn.ReLU(),
nn.MaxPool2d(3,2,1),
)
self.layer_2 = nn.Sequential(
BottleNeck(base_dim,base_dim,base_dim*4,self.act_fn),
BottleNeck(base_dim*4,base_dim,base_dim*4,self.act_fn),
BottleNeck(base_dim*4,base_dim,base_dim*4,self.act_fn,down=True),
)
self.layer_3 = nn.Sequential(
BottleNeck(base_dim*4,base_dim*2,base_dim*8,self.act_fn),
BottleNeck(base_dim*8,base_dim*2,base_dim*8,self.act_fn),
BottleNeck(base_dim*8,base_dim*2,base_dim*8,self.act_fn),
BottleNeck(base_dim*8,base_dim*2,base_dim*8,self.act_fn,down=True),
)
self.layer_4 = nn.Sequential(
BottleNeck(base_dim*8,base_dim*4,base_dim*16,self.act_fn),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.act_fn),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.act_fn),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.act_fn),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.act_fn),
BottleNeck(base_dim*16,base_dim*4,base_dim*16,self.act_fn,down=True),
)
self.layer_5 = nn.Sequential(
BottleNeck(base_dim*16,base_dim*8,base_dim*32,self.act_fn),
BottleNeck(base_dim*32,base_dim*8,base_dim*32,self.act_fn),
BottleNeck(base_dim*32,base_dim*8,base_dim*32,self.act_fn),
)
self.avgpool = nn.AvgPool2d(7,1)
self.fc_layer = nn.Linear(base_dim*32,num_classes)
def forward(self, x):
out = self.layer_1(x)
out = self.layer_2(out)
out = self.layer_3(out)
out = self.layer_4(out)
out = self.layer_5(out)
out = self.avgpool(out)
out = out.view(batch_size,-1)
out = self.fc_layer(out)
return out
4. Optimizer & Loss¶
In [11]:
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
model = ResNet(base_dim=64).to(device)
'''
for i in model.children():
print(i)
'''
loss_func = nn.CrossEntropyLoss()
optimizer = optim.Adam(model.parameters(),lr=learning_rate)
5. Train¶
In [12]:
for i in range(num_epoch):
for j,[image,label] in enumerate(train_loader):
x = image.to(device)
y_= label.to(device)
optimizer.zero_grad()
output = model.forward(x)
loss = loss_func(output,y_)
loss.backward()
optimizer.step()
if i % 10 ==0:
print(loss)
In [0]: